拖輪運動規劃技術研究現狀及關鍵技術
2024-06-22 16:44:17
來源:中國船檢
編輯:
國際船舶網
我有話要說

根據中國船級社《智能船舶規范》(2024)描述,智能船舶要實現八大功能,分別為智能航行、智能船體、智能機艙、智能能效管理、智能貨物管理、智能集成平臺、遠程控制船舶和自主操作船舶。其中智能航行是當下研究的熱點問題也是難點問題,受到廣泛關注。智能航行系指利用先進感知技術和傳感信息融合技術等獲取和感知船舶航行所需的狀態信息,并通過計算機技術、控制技術進行分析和處理,為船舶航行提供航速和航路優化的決策建議。在可行時,船舶能夠在開闊水域、狹窄水道、進出港口、靠離碼頭等不同航行場景和復雜環境條件下實現船舶的自主航行。智能航行要求實現兩個基本功能即航路優化與航速優化。航路優化可以納入路徑規劃范疇,航速優化可以納入軌跡優化范疇。二者合二為一可以理解為是一個運動規劃問題。因此,要想實現船舶智能航行,就要必須開展船舶運動規劃技術的研究。
拖輪又被稱作拖船,在港口作業的拖輪又被稱為港作拖輪,本文僅討論港作拖輪。相比于一般船舶,拖輪更容易開展運動規劃技術的研究,原因在于:它體積小,速度快 、操縱靈活,更有利于運動規劃算法的遷移和部署;構造堅固、穩性好,利于后續開展實船測試驗證;作業區域相對固定、通訊環境穩定;無需遵守國際避碰規則,避免了規則難以量化的問題。因此,拖輪是船舶中理想的試驗測試對象,有利于開展運動規劃技術的研究,從而率先實現智能航行。
運動規劃技術研究現狀
運動規劃技術起到了自主生成船舶航行軌跡的作用。該軌跡既要滿足避碰和節約能耗,又要兼顧船舶本身的運動學與動力學特性。因此運動規劃問題可以劃分為路徑規劃和軌跡優化兩個子問題,路徑規劃的核心是避碰,同時找到最短路徑,降低能耗;軌跡優化的核心是運動學與動力學約束,同時兼顧路徑平滑。二者兼顧,從而生成滿足船舶各項約束的可行性軌跡。
1、路徑規劃研究現狀
路徑規劃算法最初源自計算機和機器人領域的最短路徑搜索問題,隨后慢慢擴散到工業界。目前,主要的路徑規劃算法大致可分為基于圖搜索的算法、隨機采樣的算法等。
基于圖搜索算法的基本思想是先利用柵格將自由空間轉化為柵格地圖,然后在柵格地圖中搜索符合任務要求的路徑。常用的圖搜索算法有Dijkstra算法,該算法可以在柵格地圖中找到從任意起點到目標節點的最短無碰撞路徑,但該算法隨著圖中節點數目增大計算量顯著增加,為彌補這一缺陷,A*算法被提出,該算法在Dijkstra算法的基礎上引入了啟發式函數,將每個節點到終點的估計距離作為啟發值,通過比較每個柵格中累計代價與估計距離的總和來進行搜索。該算法大幅減少了無用的搜索,極大地提高了搜索效率,同時保證路徑是全局最優,被廣泛應用于最短路徑搜索問題。但A*算法只能用在靜態環境中搜索路徑,其搜索出的最短路徑也只是柵格意義上的最短路徑,很難直接應用于實際場景。因此,后續對A*算法的改進主要從動態性和路徑質量兩個方向入手。
Lifelong Planning A*可通過推理規劃的方式,對上一次的路徑搜索結果進行信息再利用來應對環境變化,從而有效減少了搜索范圍和時間,但環境的變化只能在兩次規劃之間的間隙中,如果規劃期間環境一直在變化,Lifelong Planning A*將會變得不再適用。
D*算法又被稱作動態A*算法,該算法在初次規劃時就儲存了網格中目標點到各個節點的最短路徑,在后續環境變化比如遇到動態障礙物時,可通過對內部局部地圖的更新進行在線重規劃,在保證效率的同時可以很好地應對連續的環境變化。
Field D*算法在能保證動態性的基礎上,通過插值的方法對柵格上兩節點間的路徑代價值進行線性插值來近似邊上虛擬節點的路徑代價值,從而使得路徑節點突破柵格八鄰域搜索限制,可朝任意角度搜索。Theta*算法在此基礎上更進一步,將當前節點的父節點只允許鄰近節點擴展到任意節點,然后評估當前節點的鄰接節點和父節點是否視線上可達到連續空間上的最短路徑,來實現路徑上的平滑,使得路徑更貼近現實。
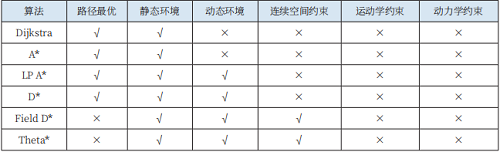
表1 基于圖搜索的路徑規劃算法比較
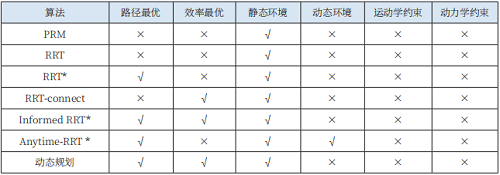
表2 基于隨機采樣的路徑規劃算法比較
基于隨機采樣的算法的基本思想是在構型空間中隨機生成一系列點,并篩選滿足任務需求的樣本序列點作為規劃結果。比較典型的采樣算法有RRT算法、PRM算法等。相較于圖搜索算法,基于隨機采樣的算法具有概率完備性,只要可行路徑存在,就一定能找到。但由于隨機采樣的緣故,該方法在搜索過程具有盲目性,造成時間上的浪費,同時生成的路徑永遠都是次優的,這一點已在數學上得到證明。
為解決上述問題,一些在RRT算法基礎上的改進算法被陸續提了出來。RRT*算法是在RRT算法的基礎上,通過重新選擇父節點和重布線操作來迭代逼近最優的可行路徑,但仍無法解決求解效率低的問題。RRT-connect是從起點和終點同時開始向中間搜索路徑,能夠顯著提高路徑搜索效率,減少采樣次數,但無法解決次優性。Informed RRT*算法在RRT*算法的基礎上通過將采樣范圍局限到一個橢球之中,并不斷迭代縮小橢球的范圍以提高路徑收斂于最優路徑的速度,在得到最優路徑的同時大大提高了搜索效率。Anytime-RRT*(實時RRT*算法)是在機器人運動的過程中不斷地更新路徑,在適應機器人運動過程中環境變化的同時保持最優的搜索路徑。動態規劃算法則是通過將復雜問題分解為多個子問題求解來提高效率,然后依次計算出每個子問題的最優解來推出復雜問題的最優解。
綜上所述,無論是基于搜索的算法還是基于采樣的算法,都能夠保證避碰,同時盡可能兼顧最優。但這些算法并沒有跳出路徑規劃算法的局限性,比如將機器人看成一個質點而不考慮實際形狀以及動力學、所有的障礙都是靜態已知的。但實際港區水域環境復雜,且動態性較強,周圍環境時刻處于變化之中,同時拖輪的行駛速度較快,對算法的求解效率有較高的要求。因此僅僅采用單一路徑規劃算法并不能滿足拖輪實時運動規劃的需求,亟需對現有路徑進一步軌跡優化。
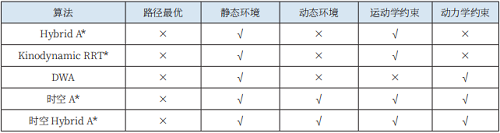
表3 軌跡優化算法比較
2、軌跡優化研究現狀
軌跡優化是在路徑規劃基礎上再優化。目前對路徑進行優化有兩種思路,一是對路徑規劃算法本身進行改進,比如在傳統路徑規劃算法的基礎上引入運動學約束,從而提高路徑的質量和可執行性。典型的有Hybrid A*算法,該算法依據機器人的最小轉彎半徑為節點擴展方向施加運動學約束,是A*算法從柵格空間跨向連續狀態空間的一步,有效彌補了A*算法在運動學方面的缺點。與之類似的還有Kinodynamic RRT*算法,該方法在RRT*算法的基礎上引入系統運動學,將連接當前節點與附近節點的直線改成對一個兩點邊界值BVP問題(最好是OBVP問題)的求解,在求解過程中加入系統運動學約束條件,從而滿足機器人運動學約束的路徑。動態窗口法(DWA)則采用類似動態規劃的思想,首先將起點到終點的多步問題拆分成一系列子問題,然后對每個子問題,根據機器人當前的狀態,對滿足機器人動力學約束的速度和角速度進行采樣,得到一系列的候選軌跡簇,然后從采樣的候選解中求取代價最低的作為當前最優解。總體來說,直接在路徑規劃算法本身改進的方法,工程量小,計算效率快。但是該類方法都存在共同的缺點,即只片面考慮了運動學或動力學約束,同時沒有考慮時間維度,不具備動態性,但真實的動態環境需要根據具體場景考慮更多約束。因此該方法不能充分利用拖輪的機動能力,生成軌跡的最優性也將受到損失。
二是采取分而治之策略,即將規劃和優化分開。前端進行路徑規劃,然后在后端專門進行軌跡優化。典型的有時空A*算法,該算法首先在前端采用A*算法搜索最優軌跡,然后在后端考慮各類約束,如平滑性約束、動力學約束等,對軌跡進行局部平滑和調整,在此基礎上,時空A*算法還增加時間維度,與空間一起構成時空狀態空間,使得算法能夠對軌跡點上的速度進行優化,從而可以從路徑及速度兩方面同時更好地處理動態障礙物。此外還有時空Hybrid A*算法,首先在前端使用改進Hybrid A*在時空范圍內進行軌跡粗搜索獲得初始軌跡,然后以初始軌跡為參考構建可行駛的時空走廊,并在后端綜合考慮動力學和軌跡連續性約束等條件,使用數值優化的方法進一步平滑初始軌跡。該類方法計算效率高、約束完備,可以很好地處理動態障礙物問題。
拖輪運動規劃面臨的問題
1、運動模型構建不合理
拖輪的運動是一個復雜的過程,受多變量耦合、多因素干擾、復雜流體動力學、隨機不確定性等方面的共同作用。其運動過程中模型的合理構建是目前拖輪運動規劃所要解決的關鍵問題。如果模型過度簡化,則后續生成的軌跡可能超出拖輪航行能力范圍,如果模型過分保守,則會限制拖輪的運動潛力,進而損害后續運動規劃算法的泛化求解能力。
2、環境信息感知不全面
對港區立體區域實時而全面的信息感知是求解運動規劃問題成功與否的前提。相較于近海、內河,港區水域面臨的周圍環境更加復雜,需要考慮水面和水下各種對船舶有航行風險的目標信息,諸如來往船舶、航道航標、水面建筑物、違規漁船等。目前船載主流感知設備如AIS、雷達、全球衛星導航系統等存在信號種類較多、數據量大、對小型動態目標的檢測能力不足等問題,難以為后續運動規劃提供實時全面的信息。
3、規劃環節考慮不充分
目前船舶領域規劃研究大都是靜態場景的規劃,動態場景的運動規劃問題還很少涉及,同時規劃領域的研究重點放在了路徑質量上,而不考慮實際航行情況,將負擔推卸至控制執行環節。比如一些運動規劃算法輸出形式只有路徑點,為實現路徑的跟蹤,控制執行環節還需要對路徑進行配速。在運動任務苛刻時,配速過程遠比路徑規劃過程困難,而控制執行環節的計算資源有限,無法承擔如此艱巨的求解負擔,這將導致最終的行駛行為質量不高,還有可能發生碰撞、求解死鎖等問題。
4、未兼顧運動規劃的效率與質量
由于拖輪的主要航行場景是迎接、伴隨大船,保障計算速度是拖輪運動規劃環節的基本要求,為保障計算速度,運動規劃算法不得不在一定程度上犧牲求解質量。這種做法雖然是可取的,但片面追求計算速度而忽視求解質量的做法普遍存在。當場景任務較為簡單時,這樣做的弊端并未顯現,但應用在拖輪迎接大船的動態復雜場景時,這種做法會因為求解質量低下而無法適用。
5、多拖輪協同運動規劃研究不深入
一般來說,為不同長度的船舶,引航所使用的拖輪數量是不一樣的。以上海洋山港水域引航使用拖輪艘數配備標準為例,引航140米以下的船舶靠泊需要1艘拖輪,引航140米以上且300米以下的船舶靠泊需要2艘拖輪,引航300米以上的船舶靠泊則需要3艘拖輪。鑒于船舶大型化和無人化的趨勢,未來將需要越來越多的拖輪來協助這些大型船舶進行靠泊作業。然而,多拖輪的協同運動規劃目前仍是一個尚未探索的領域,拖輪避碰外界障礙物、拖輪之間的路徑沖突問題需要仔細考慮。
拖輪運動規劃關鍵技術
1、拖輪操縱運動建模技術
創建精確且可靠的拖輪運動模型是有效分析拖輪操縱性和保障船舶智能航行的關鍵。常用的船舶運動建模方法包括經驗法、試驗法、計算流體動力學數值法、參數辨識法。其中參數辨識法簡潔高效、易于操作,并能夠實現在線建模等優點,逐步成為船舶運動建模的重要研究方法。但該方法也存在辨識數據質量差、魯棒性不足、復雜場景下辨識受限等缺陷,因此注重辨識數據的獲取處理、研究具有自適應性、可擴展性、魯棒性的參數辨識算法是未來拖輪運動建模技術的趨勢。
2、拖輪環境動態信息感知技術
對港區立體區域實時而全面的信息搜集是求解運動規劃問題成功與否的前提。由于船載主流感知設備如雷達、全球衛星導航系統等存在對小型動態目標的檢測能力不足的缺陷,難以為后續運動規劃提供實時全面的信息,基于激光雷達、毫米波雷達、攝像頭等多傳感器融合的感知技術是目前自動駕駛汽車領域應用最廣泛的感知方案,激光雷達是新興的感知設備,其測距精度高、響應速度快,對近距離障礙物的檢測能力十分優秀,是目前自動駕駛領域主流的感知設備,但激光雷達工作時受天氣和大氣影響大,不能全天候工作。毫米波雷達在這方面可以很好地彌補激光雷達的缺陷,相比于激光雷達,毫米波雷達的環境適應性強,可全天候、全天時工作,不受天氣狀況限制。無論激光雷達還是毫米波雷達,其本質都是通過雷達反射波探知物體的存在,并不能識別具體物體上的交通標識或文字,比如航道標志、港口標志以及船舶的號燈號型等,攝像頭可以起到對交通標識識別的作用,通過對船舶航行信號燈的燈光顏色和狀態的識別可以判斷船舶的航行狀態,為后續運動規劃提供先驗決策。因此,通過對三種設備的取長補短、有機組合,同時借助拖輪體積小,搭載成本低的優勢,將是未來拖輪感知技術很好的發展趨勢。
3、前端搜索、后端優化的時空聯合規劃技術
從上述各類規劃算法綜述可知,每種規劃算法都有各自的優點與缺點,這些方法在解決實際問題時往往并非獨立使用,而是通過互相“取長補短”,充分利用各種算法的優點來完成運動規劃任務。即采取分階段規劃策略,在前端搜索軌跡、在后端優化軌跡。在前端主要考慮避碰和能效,基于圖搜索算法的運行速度較快且實施簡單,符合拖輪船載設備計算資源有限以及對于實時性要求較高的情況。在后端基于拖輪特性和周圍復雜場景,施加各類約束,如船舶的動力學約束、位姿約束、加速度約束、連續性約束等。同時,考慮時間這一維度,為各個路徑點間分配時間并配置速度,注重計算效率的提升,最終運動規劃輸出的結果由路徑上各軌跡點和速度組成。
4、多拖輪協同運動規劃技術
多拖輪協同運動規劃存在復雜的交互和動態障礙物避碰的問題,需要從感知到行為決策全交互協同的角度開展多拖輪協同運動規劃的研究,可利用全局路徑規劃算法與局部運動規劃算法相結合的思路,根據頂推點不同為多艘拖輪分配全局路徑,并根據迭代優化的思想,在航行途中不斷評估環境信息,實時調整多拖輪局部避碰路徑。展望未來,船舶智能化時代已然來臨,在船舶智能化的浪潮下,拖輪的智能化進程也在不斷加快,運動規劃技術作為拖輪實現智能航行的標志,是拖輪邁向智能化的重要一步。但目前拖輪運動規劃技術還有許多難點問題需要解決,在未來還需要深入研究,注重理論與實踐相結合,實現關鍵技術突破,加快實船的測試驗證。相信在不遠的將來,拖輪的運動規劃技術會迎來新的發展。
作者:武漢理工大學 劉佳侖 劉嘉元 李詩杰
中國船級社 馬吉林
標簽: 智能船舶規范

為你推薦
紐約、奧斯陸還是兩者都去?船東的上市選擇

航運界網消息,隨著航運股資本的競爭,雙地上市正在流行起來。過去的一年里,越來越多的船東選擇在紐約和奧斯陸同時上市。最顯著的例子是,早已在挪威上市的BW LPG和Hafnia,近期已然決定進入美國資本市場。...
2024-06-23 18:37:03
分析師:紅海危機可能持續到2025年
航運界網消息,現貨運價的持續上漲,頭部班輪公司正在以更高的租金、更長的租期鎖定運力,投行Jefferies分析師預計三家頭部班輪公司2024年全年業績將實現三位數增長,同時淡化了紅海危機將很快解決的可能性。...
2024-06-21 19:40:15

中美綠色航運走廊工作會議在上海舉辦

6月19日至20日,以“綠色起航,共話未來”為主題的中美綠色航運走廊工作會議在上海市舉辦。會議旨在貫徹落實2023年11月中美兩國元首會晤就共同應對氣候危機達成的積極共識...
2024-06-21 19:22:51
我國首個海洋油氣完井工具“智慧工廠”建成投產

6月20日,中國海油發布消息,由我國自主研發的首個海洋油氣完井工具“智慧工廠”在天津投產,標志著我國高端海洋完井工具制造產業全面走向智能化,對提高復雜構造油氣田生產效率、縮短油氣田建設時間...
2024-06-20 22:36:13
WSC:去年海上丟失集裝箱221個創最低紀錄

世界航運理事會(WSC)的數據數據顯示,去年船公司在海上丟失的集裝箱數量大幅減少至221個,這是自2008年開始調查以來的最低紀錄。
...
2024-06-19 18:52:53

GAC將收購Quadrant Pacific船舶代理業務

近日,全球航運、物流和海事服務提供商GAC宣布已與新西蘭合作伙伴Quadrant Pacific達成協議,將收購后者的代理業務。...
2024-06-18 20:59:38
一周內,第三名船長被“拉黑”!

6月17日,美國再次瞄準參與非法運輸石油和其他商品的海運網絡的船只,針對胡塞武裝金融網絡發起制裁。
根據美國財政部的最新聲明,油輪“OTARIA”輪及該船船長Vyacheslav Salyga、船舶管理公司阿聯酋Stellar Wave Marine LLC已被列入OFAC的特別指定國民(SDN)名單。...
2024-06-18 20:56:08

揚子江船業集團宣傳樣本(中文)2024
揚子江船業集團宣傳樣本(英文)2024
漢盛海裝HANSUN-PURESTREAM壓載水系統-C&E手冊2022
漢盛海裝企業樣本2022
中船動力鎮江有限公司樣本2022
BSKY壓載水管理系統 無錫藍天電子股份有限公司

大晃機械(青島)有限公司 全系列船用泵

脫硫脫硝用噴嘴噴槍選型手冊-霧的池內
代斯米泵業技術(蘇州)有限公司中文樣本 DESMI CompactClean壓載水管理系統
Sperre斯貝利壓縮機樣本

中船動力有限公司 柴油機 發動機 發電機組 脫硫

匯舸集團-煙氣洗滌產品中文樣本