智能船舶航行風險認知誤區及破解之道
2024-05-05 10:06:13
來源:中國船檢
編輯:
國際船舶網
我有話要說

近年來,航運業數字化、網絡化和智能化水平不斷邁上新臺階,展現出廣闊的發展空間。發展智能航運既是我國引領國際智能船舶發展、主導國際航運規則制定、提升國際航運地位、保障國家安全的重大歷史機遇,也是國家發展特別是海洋強國、交通強國、航運強國建設的客觀需要。如何正確處理好智能航運發展與安全的問題已成為當前普遍關注的重大問題。此外,對這個問題的正確認知以及準確把握會在很大程度上影響我國智能航運的發展進程。
智能船舶航行風險認知現狀
在討論智能船舶航行安全風險之前,先簡單梳理與智能航行相關的幾個概念。
首先,在智能船艇大家族中,包括水面智能船艇和水下潛航器兩大類。水面智能船艇包括無人艇和水面自主船舶(MASS);水下潛航器包括遙控潛航器和自主潛航器(見圖1)。

圖1 智能船艇分類示意圖
無人艇在科研、軍事、公務等領域涉及危險系數較高或者對人體健康傷害較大的場景中被廣泛應用。此類艇長度一般在12米以內,應用范圍集中在特定場景,測試迭代集中在海上測試場,對公共水域水上交通安全影響較小。無人艇發展基本方向是任務導向,在船舶設計建造、避碰規則和安全與防污染方面與商用運輸船舶存在較大差異。遙控潛航器和自主潛航器也多用于海洋科考、軍事演習等領域,水面自主船舶(即MASS)多用于商業運輸,國際海事組織(IMO)專門立法規范此類船舶。本文討論的重點也是水面自主船舶。
從狹義上來講,水面自主船舶與智能船舶兩個概念是不能畫等號的(見圖2)。從圖中可以看出,智能船舶包含智能航行和智能機艙等多項功能,IMO劃分的水面自主船舶的四個等級只對應智能船舶的一個功能(即智能航行功能),智能航行是智能船舶面向“外部的”功能,是依靠船舶的“智能”解決航行過程中船舶與外部環境的矛盾關系,即船舶 “運動”的控制;而其他功能主要是面向“內部”的功能,解決的是船舶內部問題,是船舶“內部運行”控制。

圖2 智能船舶功能劃分表
為了協助有關當局和利益相關方確保安全、可靠地進行MASS系統和基礎設施的試驗,IMO海安委在第101次會議上通過了《自主船舶試航暫行導則》,這是IMO發布的首個MASS領域的指導性文件,是IMO對MASS相關公約規范積極探索的重要階段性成果,對規范MASS試航乃至試運營具有極其重要意義。
2022年,中國航海學會發布團體標準《船舶智能航行交通安全風險評估指南——通則》標準編號:T/CIN004-2021。標準在充分考慮船舶智能航行的技術特點、航行模式和航行場景基礎上,結合現有國際認可的安全風險評估方法、IMO《自主船舶試航暫行導則》以及實船測試案例,提出了船舶智能航行安全風險的“人、機、管、環、信”五要素風險辨識、分析與評價的指導性規定。
2022年,交通運輸部海事局將《智能船舶風險識別及海事管理措施研究》列為戰略研究課題。該課題由浙江海事局研究中心承擔,在總結梳理國內外智能船舶主要技術研發應用現狀的基礎上,識別了智能船舶發展現階段的主要風險,分析了智能船舶可能對海事監管體系帶來的影響,提出海事管理措施建議。
同年,交通運輸部海事局委托大連海事大學做了《船舶自主航行安全風險分析與評估研究》項目。研究以IMO劃分水面自主船舶的四個等級為基礎,通過分析當前船舶自主航行系統的構成及功能特點,搭建船舶自主航行的安全評估框架,并分析該框架下自主船舶遠程控制的關鍵技術和已有風險因素及評估方法,基于已有的理論建立風險評估系統、風險評估方法及風險應對策略。
2023年2月,中國向IMO第107次會議提交了名為《關于MASS航行風險評估的報告》提案。該提案充分考慮到MASS船舶有別于常規有人船舶的復雜性,基于系統——理論事故模型和過程的方法(STAMP/STPA)開展風險評估,除識別設備系統的失效之外,也關注各設備系統之間的匹配性。風險評估包括定義分析目的、構建控制結構、識別不安全行為和不安全控制行為致因分析四個方面。
為保障船舶在自主航行和遠程控制航行試驗期間持續符合安全和環保技術標準,2023年4月3日,交通運輸部海事局發布了《船舶自主航行試驗技術與檢驗暫行規定》,5月1日起施行。該規定要求在船舶自主航行試驗開展前,船舶遠程控制站應開展風險評估并采取適當措施將風險降低至可接受水平,確保試驗船舶具備不低于常規船舶的安全環保水平;試驗單位應根據試驗船舶的具體情況和試驗功能的需求,編制基于試驗前風險評估的試驗大綱 ;基于試驗前的風險評估結果,試驗責任單位應制定合理有效的應急計劃,以減少可預見事件或故障的影響。
相關船級社已經就智能船舶可能面臨的網絡安全威脅開展了海上網絡安全方面的研究。國內外相關專家、學者對智能船舶航行技術帶來的風險及應對措施等也進行了深入研究并發表了諸多文章。
智能船舶航行風險認知誤區
2023年,山東海事局承擔了交通運輸部海事局船舶監督重點工作“智能船舶海事監管措施研究”課題,要求科學識別智能船舶當前階段面臨的主要風險,有針對性地提出監管措施,降低智能船舶試驗、試航和應用風險。研究之初,課題組仍然按照傳統的思路和方法分析了四種駕駛模式可能帶來的風險并提出了應對措施。后期,課題組意識到智能航行風險問題是一個十分龐雜的問題,必須跳出IMO對水面自主船舶的四種分類方法,從宏觀視角綜合分析和研究(即跳出純技術維度,從智能船舶的智能航行技術發展演進規律、法律等不同的視角加以綜合分析研判)。
課題組首先將智能船舶發展從法律維度分成兩個大的階段,即現階段N和未來階段F(見圖3)。兩個階段的分界線是等號(條件是MASS CODE或者智能船舶法定檢驗規定的出臺)。MASS CODE計劃在2024年下半年以非強制性規則通過,2028年1月1日轉為強制性規則,也就是說2028年1月1日之前階段界定為現階段N,之后的階段界定為未來階段F。現階段的主要特征是在常規船舶A的基礎上增加一個自主航行系統B。這里的加號除了代表增加外,還有一個非常重要的含義,即傳統駕駛模式切換到自主航行系統的轉換開關。未來階段的特征是船舶具有比較成熟的自主航行系統,這個系統是在現階段自主航行系統B經過不斷的測試驗證和迭代升級、安全風險控制在認可的范圍內之后發展而來的。

圖3 智能船舶發展階段示意圖
從本質上講,現階段傳統船舶A只是自主航行系統B的測試平臺,一個測試平臺可以同時安裝多套自主航行系統。這個系統可以包括輔助駕駛、有人和無人遙控駕駛與自主航行四種駕駛模式。從這個意義上來講,現在的營運船舶也可以作為自主航行系統的試驗措施平臺。
從法律視角來看,現階段的“船舶”(A+B)不等于水面自主船舶C,并不是法律意義上的智能船舶;只有當智能航行系統B通過測試驗證和不斷迭代,其安全性、可靠性、穩定性等達到可以接受的程度后,再加上其他管理措施才能構成法律意義上的水面自主船舶C。
從宏觀技術背景和航運發展歷程來看,船舶智能航行技術尚處于初級階段,仍需要通過大量的測試對所應用的理論和技術進行迭代優化,且適用于智能航行的國際航行準則、立法與標準化工作也需要經歷漫長的過渡期。如何認知、評估和有效防控安全風險是當前船舶智能航行技術發展需要明確的根本問題,這也直接決定了智能船舶的發展進程。
從實踐來看,現階段對智能航行風險的分析通常聚焦于智能航行系統B和水面自主船舶C;而傳統船舶A在滿足最低配員要求的情況下(根據《船舶自主航行試驗技術與檢驗暫行規定》要求),船上駕駛員始終處于傳統值守狀態,必要時,可以一鍵結束自主航行,切換為人工駕駛。智能航行系統B的風險是不能傳導到A的。
目前,在推進智能船舶航行技術過程中存在下列認知誤區:
一是將IMO對自主航行船舶劃分的四個等級當成自主船舶發展的四個階段來看待,實際上這四個等級對應著自主船舶的四個技術等級和四種駕駛模式,這四種駕駛模式在實驗測試階段上完全可以在一艘船上同時進行測試驗證。
二是將現階段的“船舶”(A+B)等同于水面自主船舶C。從法律意義上講,目前不存在自主船舶,但各種宣傳報道都將現階段的“船舶”(A+B)宣傳為水面自主船舶C(或者智能船舶),從而在很大程度上對決策層和大眾造成誤導。
三是將智能航行系統B和水面自主船舶C的風險等同為現階段“船舶”(A+B)(正在進行試驗測試)的風險,實際上這些風險本身也正是需要通過測試驗證逐步迭代解決的問題。當風險出現時,可以一鍵結束自主航行,切換為人工駕駛模式。
綜上所述,與傳統船舶相比,在MASS CODE或者自主航行船舶的法定檢驗技術規則出臺前,智能船舶航行是不存在額外風險的,其風險等于甚至小于常規船舶。這個結論還可以從以下兩個方面進一步得到確認:一是實踐中很多保險公司對安裝輔助駕駛功能或者自主航行系統的船舶減免了保險費用,理由是安裝了這些系統以后,船舶航行更加安全了。
二是2022年依托國家重點研發計劃“基于船岸協同的船舶智能航行與控制關鍵技術”項目建造的我國首艘自主航行船舶“智飛”號投入商業營運,目前安全航行543航次,總里程超3萬海里,其中遙控駕駛里程1175海里,自主航行里程670海里。
當然,在船舶智能航行測試驗證具體實踐中還可能存在一些特殊風險,需加以關注并采取相應的措施:一是人工接管不及時。船舶自主航行(含遙控駕駛)狀態下,出現意外情況需人工接管時,船舶駕駛員未能及時切換人工駕駛模式,或切換后未能及時掌握船舶及周圍環境狀態,有可能造成碰撞、擱淺等事故。二是對智能航行系統過度信任,甚至依賴。自主航行狀態下,船員過度信任自主航行系統或岸基遙控人員,未能結合船舶工況及周圍環境及時發現控制指令的錯誤,造成船舶碰撞、擱淺等交通事故。
針對上述風險,相關船舶已采取如下措施來防控風險:一是自主航行(含遙控駕駛)狀態下,船上駕駛員始終處于值守狀態,必要時可一鍵結束自主航行,切換為人工駕駛。二是船舶與岸基遙控設備通過“心跳線”連接,可及時發現通信、岸基遙控等設備故障,進而通過報警提示船上人員切換為人工駕駛模式。三是自主航行系統及遙控駕駛的指令在船端駕駛臺會以圖文、語音等形式表達,便于船舶駕駛員實時監控判斷其合理性,發現錯誤及時更正或切換駕駛模式,人工接管船舶控制權。
有關建議
1、消除認知誤區
發展智能航運和智能船舶已經納入我國交通強國建設綱要,7部委聯合出臺的《智能航運發展指導意見》等注重頂層設計和船舶智能航行大系統的構建,為我國船舶智能航行技術和智能航運發展提供了戰略與政策引導。但在實踐過程中存在著具體目標和階段任務不夠清晰和具象化,研究活躍、應用示范滯后,宏觀統籌協調不夠等諸多問題。產生這些問題的深層次原因在于推進過程中普遍存在認知誤區,沒有正確分析、識別風險,導致相關部門、人員特別是決策層在推進過程中始終采取謹慎的態度。建議多措并舉,消除智能航行技術試驗測試安全風險的認知誤區。
2、加快示范應用
從智能航行技術的發展規律看,我國船舶智能航行技術要實現全球領先,必須鑄牢數據驅動和科學實驗的基礎。目前,我國積累了一批船舶智能航行技術研究與應用的案例,已進入世界船舶智能航行技術發展第一方陣,但航運公司缺乏建造和應用智能航行技術船舶的積極性,應用示范樣本量不足,成為制約我國智能航運發展的主要因素。建議從國家層面制定措施推動和鼓勵大型航運國企帶頭應用自主智能航行技術。
3、提供安全保障
在MASS CODE或者自主航行船舶的法定檢驗規定出臺前,智能船舶航行風險等于甚至小于傳統船舶。但在船舶智能航行測試驗證的具體實踐中還可能存在一些特殊風險,需加以特別關注并采取相應的措施。同時,由于智能船舶航行安全風險的敏感性,也有必要采取特殊的安全保障措施來保障測試驗證工作順利進行。目前,山東海事局制定了服務船舶遠程控制和自主航行保障方案。建議在試行的基礎上,出臺全國范圍內的安全保障方案或措施。
標簽: 智能船舶

為你推薦
船舶脫碳關鍵技術路徑評估
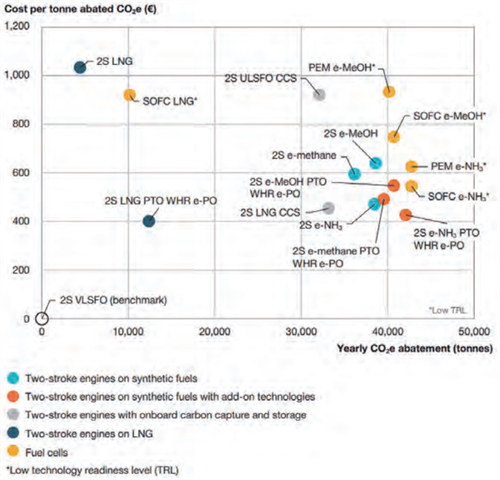
2023年7月,國際海事組織(IMO)在海洋環境保護委員會第80屆(MEPC 80)會議上通過了《2023年船舶溫室氣體減排戰略》。該減排戰略提出了四大關鍵要素:雄心勃勃的減排目標、指示性校核點、中期措施、從生產到使用以防止排放轉移到其他部門的全生命周期管理。...
2024-05-04 13:07:58
美國制裁俄羅斯!這幾家船公司及多艘船舶被列入黑名單

Seaway海事新聞獲悉,美國當地時間5月1日,美國財政部和國務院同時發布最新的制裁令,宣布對近300多家企業及個體進行制裁。其中,美國財政部對近200個目標實施了制裁,另美國國務院指定80多個目標。...
2024-05-04 10:49:05

PSA否認反對地中海航運收購HHLA

航運界網消息,新加坡國際港務集團(PSA) 日前否認其反對目前全球最大的班輪公司地中海航運(MSC)收購德國漢堡港口與物流股份公司(HHLA) 49 9%的股份。...
2024-05-04 10:33:54

胡塞武裝首次在印度洋進行直接打擊

胡塞武裝曾在 3 月中旬表示要將導彈攻擊范圍擴大到印度洋地區,覆蓋包括繞道好望角的船只。4月底,他們果然在印度洋進行了首次襲擊,并擊中目標。...
2024-05-01 22:40:10
上海國際航運中心發展促進會圓滿完成

4月29日下午,上海國際航運中心發展促進會第三屆會員大會暨三屆一次理事會議在上海遠洋賓館召開。此次會議認真總結二屆理事會以來的工作,審議通過二屆理事會工作報告、監事會工作報告、財務收支情況報告、章程修訂情況報告、管理制度修訂情況報告...
2024-04-30 20:30:06
保賠協會:石油價格上限“越來越難以執行”

國際保賠協會集團提交的報告指出,鑒證政策是一個存在缺陷的制度,可能使保賠協會、船東、經營者或承租人都面臨違反石油價格上限的風險...
2024-04-30 18:06:51
霍爾木茲海峽影響全球21%LNG供應量

2023年,卡塔爾出口了約8100萬噸LNG,阿聯酋出口了400萬噸,占全球供應量的21%。供應鏈中斷會損害這兩個國家出口商的利益,迫使主要進口商尋找新的來源。亞洲進口商受到的影響最大...
2024-04-30 17:22:11

江蘇揚子江船業樣本2023中文

江蘇揚子江船業樣本2023英文

漢盛海裝HANSUN-PURESTREAM壓載水系統-C&E手冊2022
漢盛海裝企業樣本2022
中船動力鎮江有限公司樣本2022
BSKY壓載水管理系統 無錫藍天電子股份有限公司

大晃機械(青島)有限公司 全系列船用泵

脫硫脫硝用噴嘴噴槍選型手冊-霧的池內
代斯米泵業技術(蘇州)有限公司中文樣本 DESMI CompactClean壓載水管理系統
josun 船用空調產品系列

揚帆集團
Sperre斯貝利壓縮機樣本

中船動力有限公司 柴油機 發動機 發電機組 脫硫

匯舸集團-煙氣洗滌產品中文樣本

康士廉電子產品(上海)有限公司,consilium,vdrF2